Mañana el día del socio en mi club, el
Club Libélula. Este evento me lo he tomado como mi reencuentro con el campo de vuelo. Llevo mucho sin volar, en especial desde que tuve los problemas de cervicales. Pero mañana lo haré, o lo intentaré en función del tiempo.
Para esta ocasión elegiré un valor seguro, se trata de mi Gemini de Multiplex. Ya en su momento le cambié le tren por uno de fibra de carbono en base a las malas experiencias previas con los trenes de Multiplex.
Me ha dado por comprobar las baterías que solía utilizar para este avión y ¡sorpresa!, están hechas un asco.
Lo primero que he tenido que hacer es instalar el software de EagleTree en el equipo que tengo actualmente en mi taller. Resulta que avanzadísimo eLogger V2 está más obsoleto que yo, incluso el fabricante ha dejado de mejorar el software. Al menos
EagleTree mantiene un vínculo en su página para descargar la última versión compatible que es la
6.93. El problema es que el vínculo no funciona.
EagleTree da soporte vía foros que es muy "social" pero una porquería, Me he dado de alta en los correspondientes foros y nada, no ha contestado nadie. Me he quedado sin la última versión compatible.
Afortunadamente, en mi antiguo portátil he encontrado una versión previa que funciona y la he conseguido instalar.
He analizado tres baterías viejas y una nueva (todas iguales) y estos son los gráficos:
B2
Esta batería tiene muchos ciclos ya. Se puede ver que aguanta casi los 17A de descarga, pero cuando lleva acumulados 1.000mAh se acaba progresivamente. Ademas mantiene un voltaje por debajo de los 9V y como se trata de una batería de 3 elementos, convendría limitarla a 10A de descarga.
B3
Esta otra tiene peor gráfica que la B2. Para mantener el voltaje en una zona segura no había que pedir mas de 10A. Cuando había acumulado una descarga de 1.000mAh no era capaz de soportar esos amperios. La dejaré como anterior o peor aún, ni siquiera me da confianza como batería de vuelos cortos.
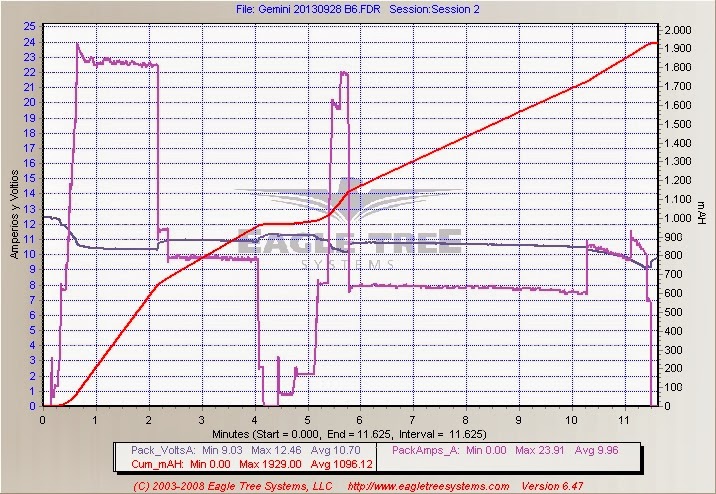
B6
Esta batería es mas nueva que las anteriores. Soporta bien una descarga de 21A hasta que lleva acumulados 1.400 mAh de descarga, Creo que esta la podré utilizar mañana.
B7
Esta es nueva, a estrenar. Se puede ver lo bien que soporta los casi 23A que pedía el motor sin caer el voltaje. No he podido mantenerla a 22A mucho tiempo porque es muy tarde y los niños se despertarían. El voltaje a caído cuando ya llevaba descargada 1.800mAh. No son los 2.200 nominales pero es suficiente. La potencia entregada es 200~250W que es suficiente para que el Gemini haga acrobacia.


















































{kind=link}